20024/09/12 - Penfoulic Problématique des dorades K2
20024/09/12 - Penfoulic Problématique des dorades K2
Cases à cocher
Mikado
Date
12.09.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Marine et Antoine, ainsi que Mat' le conchyliculteur concerné par la problématique des dorades qui mangent les cultures de coques ; sur sa plate.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Rallonger la lunette de calfat pour le catamaran
Avoir un sondeur à écran
Besoin d'avoir de l'eau de rincage sur le bateau
Besoin de vider la carte mémoire du KOSMOS après chaque sortie en mer, de reformater la carte car la suppression de fichier sur la carte ne fonctionne pas. Pas de vidéos de la deuxième sortie en mer sur Skravik par manque d'espace sur la carte.
Éviter d'utiliser des boot trop long dans faible profondeur, complique beaucoup la remontée sur le catamaran (besoin de ravaler le boot trop rapidement)
Retour sur les problèmes rencontrés et les pistes d'améliorations
Pas de GPS
Zodiac qui se dégonfle
Besoin d'écrous, de rondelles et de vis pour mettre la réhausse
Le KOSMOS ne tourne pas aux bons intervals de temps ni aux bons angles
Besoin d'une gaffe
Achats de nouvelles cartes sd
Sécuriser les caisses noires
Retour sur les problèmes rencontrés et les pistes d'améliorations23 août 2022
Bonne sortie pour le KOSMOS avec de très belles prises d’images.
5 vidéos exploitables. (dont une de 50 min)
Cependant quelques problèmes sont à noter :
Toutes les vidéos tournées n’ont pas pu être exploitées
Problème de fichiers vidéos corrompus dû au manque d’espace sur la carte et ce malgré la suppression de tous les fichiers vidéos et CSV.
Les fichiers .h264 sont générés mais sont alors vides et non convertibles en .mp4.
Il faut donc formater la carte en mettant de côté le dossier CSV, le dossier vidéo et le fichier kosmos_config.ini. Puis les recoller dans la carte après formatage.
Problèmes de dialogue avec la machine
Le kosmos répond parfaitement lors de la mise à l’eau, remonte en continuant ses rotations, mais ne se stop pas convenablement. C'est-à-dire qu'il n’est pas possible de relancer une seconde vidéo sans préalablement éteindre puis rallumer la machine.
Peut-être que ce problème découle du manque d’espace disponible sur le disque (très probable car le début des bugs correspond au moment où les fichiers ne s'enregistraient plus).
Sinon le problème peut également découler d’une batterie usée.
Cassure d’un bras de fixation du tube
Suite à une manipulation malencontreuse une pièce R1.2 a été cassée alors que celle-ci était déployée. (la caméra KOSMOS était rangée dans sa pelicase)
Il faudrait penser à prévoir des pièces de rechange.
Temps de pause trop lents
Après visionnage des vidéos, la caméra marque des pauses de 38 secondes.
Paramètres renseignés dans le fichier kosmos_config.ini sur kosmoscle1
Temps d'attente entre deux rotations (secondes)
SETT_MOTOR_STOP_TIME = 19
Temps de fonctionnement en secondes (à ajuster pour avoir 60 degrés)
SETT_MOTOR_RUN_TIME = 20
Il faut réduire le temps d’attente du KOSMOS 1 (SETT_MOTOR_STOP_TIME)
A faire pour la prochaine sortie
Formater la cle du KOSMOS 1
Changer la batterie
Imprimer une nouvelle pièce R1.2
Réduire le temps d’attente du KOSMOS 1
24 août 2022
Très bon déploiement d’un point de vue instrumental. 7 vidéos sont exploitables.
Le KOSMOS à très bien fonctionné par correction des problèmes de la veille.
Pas de problèmes de batterie, pas de problème d’espace mémoire après formatage de la carte. Toutes les vidéos prises sont convertibles en mp4.
Le temps de pause par secteur est bien paramétré à 30 secondes
Paramètres renseignés dans le fichier kosmos_config.ini sur kosmoscle1 :
Temps d'attente entre deux rotations (secondes)
SETT_MOTOR_STOP_TIME = 14
Temps de fonctionnement en secondes (à ajuster pour avoir 60 degrés)
SETT_MOTOR_RUN_TIME = 20
Temps de pause réduit de 19 à 14 secondes
Problèmes notables lors du déploiement :
Lors de la mise à l’eau de l’appareil, un bout trop long s'est enroulé dans l’appareil et c’est retrouvé pris dans le moteur. (heureusement pas dans l’hélice)
Veiller à bien lover le restant du bout avant la mise à l’eau.
Piste d’améliorations sur le kosmos :
Modifier le mode de fixation du tube sur le réducteur (actuellement vis/écrou sur pièces R1), Nécessite deux outils en main, et donc une seconde personne pour tenir l’appareil.
Les vis, écrous peuvent facilement tomber lors du montage/démontage et se perdre.
Peut être envisager une vis manuelle ou un serrage similaire à la fixation des mousquetons sur les gréements. (plus besoin d’outils)
Localisation de la zone de déploiement : Saint Nicolas, Ile du Loch et Penfret
2022/09/05 - Là où s'arrête le rôle d'un FabLab dans le développement technique
2022/09/05 - Là où s'arrête le rôle d'un FabLab dans le développement technique
Date
05.09.2022
Auteur
Guillaume Leguen
Constat de départ
Après 2 ans et demi de projet, le KOSMOS est conçus mais la mise au point s'avère être une étape longue et fastidieuse.
Solutions ou pistes explorés
Forces
Un Fab Lab est un espace collectif où se retrouvent une grande diversité de personnes, de compétences et de disponibilités. S'appuyer sur ce type de structure peut-être de mon expérience très porteuse pour accélérer un projet technique (ou non) et surtout sortir de conceptions habituels. Faire appel à l'inteligence collective permet et c'est sa force de trouver un autre chemin, de lever des problématiques auquels les institutions et les entreprises ne parviennent à répondre.
Faiblesses
Le développement d'un objet technique est une chose. C'est à dire de l'idée au prototype. Hors le prototype bien qu'il soit détenteur des innovations, ne sera pas fonctionnel. La question de la mise au point est là.
Un Fab Lab, est-il le bon lieu et le bon univers pour s'adonner à la rigueure nécéssaire pour mettre au point ?
Résultats
Cette démarche nécéssite selon moi d'imposer un développement Open Source. En effet un Fab Lab est une structure souvent à but non lucratif, proposant à de spersonnes de s'impliquer bénévolement. L'open source est une manière de poser une condition qui puisse valoriser ce travail non rémunéré. Le projet deviendra partageable, reproductible. La condition de commercialisation reste à discuter.
A mon avis, il est difficile en impliquant les citoyens de faire le travail de mise au point. Peut-être faut-il confietr cette tâche délicate à une personne quanlifié. Dans ce cas où ce trouve la marge de manoeuvre du bénévole ?
Peut-être faut-il abandonner cette volonté d'impliquer du moin sur cette étape d'ajustage ! Pour concentrer les forces bénévoles qui donnent de leurs temps sur les phases de créativités.
Dans ce cas. Il sera nécéssaire sans-doute de veiller à ce que les techniciens a qui seront confiés les réglages soient en accord avec ce principe de confection et ne remette pas en question la conception elle-même sans au préalable consulter ceux qui ont conçus l'objet.
Ceci serait une gymnastique délicate, puisqu'il serait nécéssaire de bien cadrer les actions de chacuns et de veiller à ce que chaque acteur agisse dans ce qui lui est permis de faire. Egalement il faudra mettre en communication (avec reformulation sans aucun doute) ces deux parties pour obtenir un système conforme au cahier des charges tout en ayant ce goût du collectif. Cette touche un peu farfelu qui donnera à un sytème qui pourrait être conventionnel, l'ingéniosité d'être reproductible.
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Heure UTC. Proximité plage touristique 30m, proximité d’affleurement rocheux. Voiliers au mouillage a envrion 20m.
2023/02/23 Atlantea (Sailowtech) - Saint Pierre (Martinique)
2023/02/23 Atlantea (Sailowtech) - Saint Pierre (Martinique)
Date
23.02.2024 - 20:30
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Heure UTC. Fond sable. Proche épave du Roraima. Atterrissage à côté d’un filet de pêche abandonné. Ciel couvert, pluie. KOSMOS posé à 60-70m !
Retour sur les problèmes rencontrés et les pistes d'améliorations
Pose depuis un paddle, avec assistance en snorkeling
Mise en fonctionnement compliquée -> réaliser une plaquette explicative
Il faut toujours utiliser un bouée de surface, meme si la zone est peu profonde
Visibilité très réduite
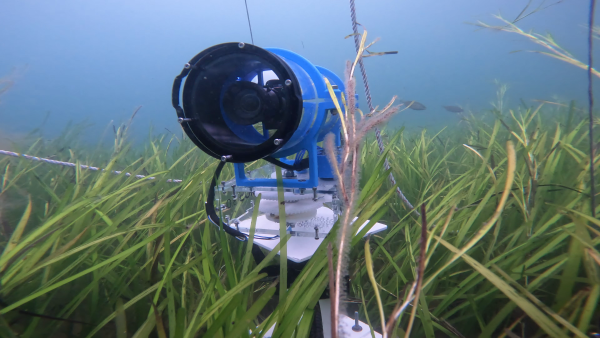
Pose des systèmes dans des herbiers de zostères et sur la roche médiolittorale
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Tester le protocole KOSMOS à bord d'un grand voilier avec un public novice
We Explore
Roland Jourdain, Antoine, Enseignants-chercheurs + étudiants en biologie marine
10 stations
Retour sur les problèmes rencontrés et les pistes d'améliorations
Problèmes rencontrées et pistes d'améliorations - le bout passe sous le bateau => plomb à ajouter pour faire couler le bout s'il est trop long
- difficultés à valider le bon positionnement de la camera => mire de couleur à ajouter en haut
- manutention avec les moteurs du We Explore et pas à la voile
- pas de déploiement en paddle car pas pertinent vu la maniabilité suffisante avec les moteurs
2023/06 - Essai côtier - Plage de Cabellou - Paddle
2023/06 - Essai côtier - Plage de Cabellou - Paddle
Cases à cocher
Staviro
Date
13.06.2023
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Essai faisabilité du protocole en mer sur des niveaux 2 (Intermédiaire en science participative)
Sans embarcation, placement des caméras sur zone côtière (Utilisation d'un paddle)
Cecile Le Sausse, Fregan Nillon et Tanguy Cesbron
2 stations
Retour sur les problèmes rencontrés et les pistes d'améliorations
Météo : Soleil
Embarcation : Sur une utilisation embarcation type paddle, 3 personnes sont nécéssaires à la réalisation de la mission. Une sur le paddle avec la caméra, 2 dans l'eau pour repérer la zone, récupérer la caméra sur la paddle et la positionner dans l'eau.
Problèmes rencontrés :
- Diffcultées à visionner la led de couleur afin de savoir si l'étape a bien été réalisée;
- Structure en deux pièces avec la partie trépied et mobile flottant plus dificil à manipuler;
- Emmener le protocole en mer n'est pas possible, sauf si plastifié (photo via téléphone non visible à cause du soleil);
- Manque de clareté sur quelques points du protocole;
- Difficultées à prendre les coordonnées du point GPS avec la dérive et la visibilité sur le téléphone;
- Etanchéité du caisson : le socle latéral semble s'être légèrement décompréssé avec le soleil;
- Importante turbidité de l'eau au jour J;
Pistes d'amélioration :
- Imaginer un système sonore, en complément de signaux visuels clairs, pour signaler quand l'étape a bien été réalisée; (que visuel ou que sonor pas suffisant)
- Améliorer le protocole sur les étapes préliminaires avant la mise à l'eau, ou le type de fond recherché; checklist de mise à l'eau (pour éviter, dans un élan de surmotivation, l'oubli de la vérification de l'étanchéité notament)... Peut être peut on graver la checklist sur le support suppèrieur de la structure
- Inclure un traceur GPS dans le Kosmos (A voir si cela fonctionne avec la propagation des ondes dans l'eau);
- Rester sur la structure avec le support en bois qui est plus maléable lors de la mise à l'eau et du transport;
- Documenter les impacts de l'Homme et de ses activités au sein d'un bassin versant et ses impacts sur le milieu marin côtier;
-Améliorer la force de l'aimant ou bien imaginer un système d'activation télécommandé à distance (Une télécommande étanche que l'on peut avoir à la surface pour activer la caméra).
- Passer les planche de CP en panneaux plastiques recyclés?
Pour le mode de mise à disposition du matériel aux citoyens: plutôt en peut être en journée participative particulière ou sur des navires/iitiatives d'opportunités spécifiques plus que mise à disposition à tout le monde tout le temps.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Zodiac (K2)
- Être au moins 3 sur le bâteau (1 pilote et 2 pour le KOSMOS)
- Bien définir les rôles de chaque personne au début de la session
- L'ardoise n'a pas été utilisée (il faut se fier à l'horodateur du KOSMOS)
- Les positions GPS ont été prises avec une montre connectée GARMIN
- Les vidéos n'ont malheureusement pas été sauvegardées (mais les CVS sont sur la clé USB) >> Mise en évidence du problème
>> la clé USB doit être mise sur un port USB 3.0 (ports bleus) et nons sur l'USB 2.0 (ports noirs)
Paddles (K3)
- 3 Paddles doivent être utilisés pour déployer le KOSMOS K3 (avec le support en bois)
- Utilisation de poids à hauteur de 3 kg insuffisant (mettre 6 kg) >> le K3 a été sur le flanc lors d'une manip.
GROUPE MERCREDI
- Lors de la phase de déplacement entre 2 stations : Paddle1 - Paddle_central (2 personnes qui encadrent le KOSMOS) - Paddle3 (4 personnes)
- Lors du largage : 2 personnes sur 1 paddle avec le KOSMOS sur un coté + 1 personne derriere afin de contrebalancer le poids lors du largage
- Lors de la récupération : Peut être faite en zodiac mais aussi
GROUPE JEUDI
- 2 paddles : 1 personne sur chaque paddle (en V)
- Dépot du KOSMOS dans l'écart à 2 personnes
- Pour la récupération, faire de la même manière
- Le plus difficile est de maintenir les V assez ouvert pour que le KOSMOS ne touche pas les paddles
Localisation de la zone de déploiement (entrez la ville proche et bouger le curseur dans l'onglet suivant) Dellec
2023/07/07 - Essai côtier - Plage de Cabellou - le 7 juillet 2023
2023/07/07 - Essai côtier - Plage de Cabellou - le 7 juillet 2023
Date
07.07.2023 - 15:00
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Objectif(s) du déploiement Approche mise à l'eau kosmos avec association APPAK de l'anse de Kersaux
Type de bateau/support de déploiement Beneteau, petit bateau de pêche plaisancière, 6m
Constitution de l'équipage François MEVEL, Antoine JEGU et Fregan LE NILLON
Nombre de stations 6
Retour sur les problèmes rencontrés et les pistes d'améliorations
Problèmes rencontrées et pistes d'améliorations - Poids du système kosmos important, difficulté à mettre à l'eau
- Support trépied mobile non pratique
- Possibles difficultés à lier les activités de pêche en mer et les déploiement kosmos en même temps. (Selon François, il faudrait consacrer une journée spécifique pour le kosmos et d'autres pour la pêche mais surcharger le bateau avec des casiers, des filets, des lignes de pêche + des kosmos ne semble pas faire bon ménage)
Après traitement vidéos :
- trop de turibidité sur 5 des 6 vidéos = images pas exploitables. => Disque de Secchi pour un proxi sur la turbidité
- Kosmos un incliné sur la dernière - sur Sargasse
Localisation de la zone de déploiement (entrez la ville proche et bouger le curseur dans l'onglet suivant) Plage de Cabellou (proche des corps-morts écologiques et des amas rocheux à la pointe au large)
2023/07/12 - Les freins déterminés à partir du déploiement en mer - 2023
2023/07/12 - Les freins déterminés à partir du déploiement en mer - 2023
Date
12.07.2023
Auteur
Fregan
Constat de départ
Sur le pôle Concarneau, nous sommes arrivés au stade du deploiement en mer, la partie technologique étant globalement fonctionnelle (des améliorations sont encore à venir mais le Kosmos en l'état permet la récupération et l'analyse des données).
Le projet mené en sciences participatives se doit de faire intervenir une diversité d'acteurs pour essayer et essaimer les deploiements en mer. Les moyens déterminés pour les essais en mer sont :
- embarcations légères (paddle, kayak)
- bateaux (motorisé ou à voile)
Les points suivants correspondent aux freins determinés en date du 12-07-2023 sur le projet sur les aspects de déploiement en mer et traitement des données.
Solutions ou pistes explorésFreins sur la partie déploiement en mer
Aujourd'hui, nous faisons face à un manque de personnel compétent sur l'utilisation d'un bateau. Nous avons tenté plusieurs approches restant pour la plupart perplexe sur l'investissement sur le long terme.
1- Nous nous sommes rapproché d'une association de pêcheurs plaisanciers, un premier essai a été mené, au moyen d'un de leur bateau. La mission consistait à observer les mouillages écologiques installés récemment au port. Après avoir observé les installations de mouillage pour l'association, nous avons réalisé quelques points dans la baie de Concarneau. D'après le pêcheur, il ne semble pas possible de concilier déploiement Kosmos et activié de pêcherie. Un calendrier de sortie doit être déterminé pour faire des points Kosmos (la formule de "prestation" est rapidement arrivée dans la conversation mettant un frein à la science participtive initialement engagée).
2- Une campagne menée avec l'Ifremer Concarneau et son bateau "Enezeg" à eu lieu en 2022. La répétition de l'opération ne semble pas être possible par manque de moyen humain du côté de l'Ifremer Concarneau. Les ordres de missions ne sont pas disponible sur ce plan. Le bateau reste toutefois présent mais sans permis bateau et habilitation délivrée par l'Ifremer, le bateau ne peut être utilisé. Nous avons évoqué des membres de l'Ifremer de Brest qui pourrait venir faire le déplacement et participer aux campagnes en mer mais une fois de plus la notion de prestation est revenue. Le temps de déplacement doit être facturé pour justifier le temps passé sur le terrain par les scientifiques. Un autre frein au deploiement en mer est toute la préparation amont avant la journée terrain : ordre de mission, participants, déplacements, pour au final se rendre compte que la météo ne permet pas la sortie. Repousser la journée terrain est parfois compliqué du point de vue administratif dans le cas ou la météo ne le permet pas le jour J.
3- Explore possède un zodiac qui a été également utilisé lors de la première campagne de déploiement en mer. Cependant, Explore n'est pas disposé a laisser son bateau et réalisé les essais en mer. Son rôle en tant que pilote du projet est de trouver les ressources publics ou dans le public permettant de mener à bien le projet dans son entierté.
4- L'utilisation des embarcations légères ont rapidement leurs limites en terme de moyen embarqué à bord (1 kosmos à la fois, notation des points GPS, relevés heure, météo, station compliqués). Pour l'objectif pédagogique cela est le moyen le plus simple et accessible à tous mais peu des points peuvent être réellement réalisé par ce moyen.
RésultatsFreins sur la partie traitement des données obtenue via le Kosmos
L'Ifremer a mis un stagiaire sur la partie analyse des données récoltées permettant d'avoir une chaîne continue sur le projet Kosmos. Cependant le stagiaire actuellement à charge fini son stage. Il faudrait donc que l'Ifremer mandate un autre stagiaire sur le sujet et le reformer.
1- Nous avons observé que les objectifs de l'Ifremer et du Konk Ar Lab sont assez diffents surtout au niveau de la science participative qui n'est pas présente au niveau de l'Ifremer. Ainsi peu de documents expliquant la démarche existent.
2- La question de traiter les données en interne au Konk Ar Lab via des bénévoles a été abordé. Cependant, un scientifique ne peut être remplacé par un bénévole lambda. La phase de formation sur l'analyse des données est conséquente, les compétences en reconnaissance doivent être maitrisé en amont du projet. L'intégralité d l'analyse ne peut être réalisée par le KAL qui ne dispose pas de toutes les compétences analytiques nécessaires.
3- La notion de redondance pour tout ou une partie de l'analyse réalisé par les bénévoles a été abordée. La répétition de la tâche ne les incitera pas à analyser les données régulièrement. Ainsi un gros pool de pseudo-analyste doit être formé de façon à ce que les données soient progressivement analysées (Attention à bien centraliser les données sur un même serveur de façon à ne pas perdre de données - plus il y a de participants, plus les données sont éparpillées et peuvent être égarées).
4- La participation de certaines universités de formation halieutiques ont été mentionné comme potentiellement intéréssante pour analyser les données. Cependant, cela doit s'inscrire dans le cadre d'un module de cours avec une maquette pédagogique préalablement déterminée. Un TP par an par école peut avoir lieu mais ne permet certainement pas de traiter l'intégralité des données collectés en une année.
2023/07/17 -Temps de Préparation du Kosmos avant essai en mer
2023/07/17 -Temps de Préparation du Kosmos avant essai en mer
Date
17.07.2023
Auteur
Antoine JEGU et Fregan LE NILLON
Constat de départ
Avant de mettre le Kosmos à l'eau pour réaliser des prises vidéographiques, il est nécéssaire de paramètrer, préparer et vérifier le matériel. Différentes étapes sont nécéssaires et prennent chaqu'une du temps.
- Chargement de la batterie (6h)
- Vidage et formatage de la carte SD (15min)
- Vérification de l'étanchéité de la caméra (5min)
- Préparation de la fiche terrain (5min)
- Vérification de bon fonctionnement (5min)
2023/07/17 -Temps de préparation post mise à l'eau
2023/07/17 -Temps de préparation post mise à l'eau
Date
18.07.2023
Auteur
Antoine
Constat de départ
- rincage à l'eau douce et nettoyage du matériel (10min)
- séchage et ouverture du boitier (5min)
- dérush des vidéos sur disque dur (1h)
- conversion des vidéos en mp4 (6h)
- remplissage du Wiki et création d'une fiche (15min)
- mise au propre de la feuille terrain
2023/07/19 - Explore/KAL - Plage de Pouldohan - Paddle
2023/07/19 - Explore/KAL - Plage de Pouldohan - Paddle
Date
19.07.2023 - 15:00
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Juliette (N3) et Fregan (N2)
Embarcation : Paddle
2 stations
Retour sur les problèmes rencontrés et les pistes d'améliorations
Conditions météo avec fort vent et vagues.
Format employé : Un plongeur PMT et une personne sur le paddle
Pour un essai avec une personne de niveau 3, le briefing est capital. Des rappels en mer sont nécessaire afin d'expliciter certains points du protocole (pas amené car pas pratique sur paddle)
Deux stations réalisées sur les abords de la côtes avec des profondeurs de 2,5 m et 3,5 m.
Les vagues ont causés des turbulances sur le paddle en ont antrainer la chute de la caméra à deux reprises.
Outre les vagues, la structure paddle semble légèrmeent trop petite et ne permet pas de reposer de façon stable le kosmos sur le paddle. Un mouvement de rame peut vite le destabiliser.
Le poids de l'équipement est encore apparu comme un problème. Le déploiement en autonomie demande à être plusieurs pour soulever la caméra lors de la mise et sortie à l'eau.
Lors du rangement, des visiteurs avec un groupe d'enfants sont venus à notre rencontre questionner l'utilité de la caméra et son but. Une démonstration de l'utilsation de la caméra a été faite sur le parking et nous avons présenté des vidéos d'essais en mer à l'aide d'un ordinateur. Le fish Quizz est un plus pour le jeune public. La partie sensibilisation en aval de l'essai en mer est très bénéfique. Garder un temps pour présenter le projet lors sur le parking ou sur la plage.
2023/07/21 - Campagne Bretagne Vivante autour de l'île des Moutons
2023/07/21 - Campagne Bretagne Vivante autour de l'île des Moutons
Cases à cocher
Staviro
Date
05.07.2023
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Bretagne Vivante : Nazaré, Marion, Margot
Ifremer : Aurélien Tambutté
Konk Ar Lab : Antoine Jegu
Explore :Fregan LE NILLON
Embarcation : Zodiac MIL Pro Réserve Nationale des Glénan
Nombre de station réalisée : 10 environs
Retour sur les problèmes rencontrés et les pistes d'améliorations
Problèmes rencontrés et choses à retenir :
1- Identification des zones de prises de vidéo. La détermination d'un point précis sur site grâce à une carte papier et le radar GPS du bateau semble compliqué à croiser. De plus, la dérive du bateau impact fortement la position définit entre le moment ou la caméra est allumée et le moment ou elle est déposée dans l'eau.
2- L'utilisation de la lunette de calfat pour visionner les fonds marins de faible profondeurs a été fortement apprécier par l'équipe. Elle permet de déterminer quel habitat est présent sur la zone de lancement, ainsi que d'observer la mise à l'eau du Kosmos et vérifier s'il se pose correctement au fond de l'eau. Cependant après 10 mètres de fond en bonnes condtions météorologiques (peu de turbidité) il est compliqué de voir.
3- L'utilisation de l'ardoise pour la rigueur des résultats est très lourde. Elle ne peut être utilisée que dans le cadre du bateau car paddle ne le permet pas. Le choix de la typologie de notation des points (100 ou 001). Attention au marqueur utilisée pour l'ardoise, un indélébile ne fait pas bon ménage sans pipette d'alcool pour nettoyer l'ardoise après coup. Prendre plus de vélédas.
4- Lors du largage de la caméra, il faut prendre le temps d'accompagner le bout lentement dans l'eau afin de conserver la stature droite de la caméra dans la colonne d'eau. Attention également à la dérive, le bout se glisse sous le bateau et parfois sous l'hélice, penser à se mettre sous le vent.
5- Penser à vérifier la profondeur avant de poser la caméra, le bout doit être assez long. Bien enregistrer le point GPS sur le lieu de pose de la caméra.
6- Le système K2 avec son mobile en tryptique est toujours difficile d'usage.
2023/07/24 - Poster pédagogique Impact des activités anthropiques sur les milieux marins
2023/07/24 - Poster pédagogique Impact des activités anthropiques sur les milieux marins
Date
27.07.2023
Auteur
Fregan LE NILLON
Constat de départ
Poster portant sur les impacts des activvités anthropiques sur les milieux naturels côtiers. Reprend le dossier à ce même nom. Sert de support à l'argumentation du dossier avec les grandes idées clés
2023/07/25 - Sortie en mer Appel du large avec jeunes de Concarneau
2023/07/25 - Sortie en mer Appel du large avec jeunes de Concarneau
Date
25.07.2023
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Appel du large et jeunes de Concarneau - Shrampi 3000 (voilier 30 pieds), équipage 3+1 puis 4+1, Une station réalisée avec chaque groupe (soit 2 au total)
Retour sur les problèmes rencontrés et les pistes d'améliorations
Première utilisation de la fiche de retour d'expérience Kosmos (temps alloué : 10 minutes, faisabilité élevée)
Prise en main du kosmos facile grâce aux explication de Antoine
Mise à l'eau aisée malgré le cockpit étroit. Kosmos assez lourd à déplaceret prend beaucoup de place dans l'habitacle.
Problèmes de météo limitant les manoeuvres (se mettre sous le vent pour récuêrer la bouée puis la passer sous le bateau pour la remonter à bord).
Forte turbidité de l'eau (beaucoup de sédiments) images peu exploitables.
Conseils : LED Verte quand le film tourne
LED éteinte quand la caméra est arrêtée
sinon c'est assez instinctif comme fonctionnement.
Outils de sensibilisation autre : développer un atelier sur les habitats sous-marins (herbiers de zostère, maêrl, ...) Cependant, le Kosmos illustre bien tous les propos qu'il est possible de trouver. Receptivité des jeunes ++ qui ont participé à la mise à l'eau.
Constat de départ
Demande de rigueur dans le retour d'expérience sur bateau ou paddle lors de pose de caméra en autonomie. Besoin d'une feuille aidant les utilisateurs de la caméra à analyser tous les points clés sur la mise à l'eau et faire un retour sur une innovation à apporter ou un conseil.
Solutions ou pistes explorés
document fiche retour d'expérience à distribuer aux participants (une pour tous le groupe ou à faire en petits groupes plus réduit)
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Deux personnes manipulant sur un voilier de 13.5m au mouillage, puis une station en annexe proche du voilier. Deux stations effectuées.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Mise à l'eau depuis l'annexe : risque d'abîmer le gonfleur avec les pièces en aluminium qui dépassent. Possible de bien limer les rails en aluminium du trepied pour qu'il n'y ait pas d'angle.
Lieu du déploiement
Hugh Town (au large de Porth Loo)
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Deploiement à pied par un plongeur depuis la plage à environ 20m du bord. Une station réalisée. Pas d'installations humaines à proximité. Présence de chasseurs en plongée à environ 100-200m. Une station réalisée
Retour sur les problèmes rencontrés et les pistes d'améliorations
Mise à l'eau depuis la plage compliquée, risque de cogner la caméra sur les galets et rochers même si peu de vague. Fin de journée avec une luminosité déclinante, la visibilité est de plus en plus mauvaise. Quasi pas d'observation de faune alors qu'à quelques metres, de nombreux poissons étaient dans les rochers. Privilégier un meilleur ensoleillement. Eviter les deploiements depuis la côte.
2023/12/22 Atlantea (Sailowtech) - Puerto de la Estaca, El Hierro (Canaries - Espagne)
2023/12/22 Atlantea (Sailowtech) - Puerto de la Estaca, El Hierro (Canaries - Espagne)
Date
22.12.2023 - 10:00
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Deploiement en annexe avec trois personnes à la sortie du port, à proximité d'une zone de baignade. Ponton de ferry à 200m
Retour sur les problèmes rencontrés et les pistes d'améliorations
Annexe et son ancre restée au dessus du KOSMOS pendant l'acquisition, il aurait fallut partir complètement. Corde reliant le KOSMOS à son orin ne flottant pas, on le voit pendre devant la caméra, mieux vaut prendre un bout flottant.
Lieu du déploiement
Puerto de la Estaca, El Hierro
2024/01/19 Atlantea (Sailowtech) - Santa Luzia (Cap-Vert)
2024/01/19 Atlantea (Sailowtech) - Santa Luzia (Cap-Vert)
Date
19.01.2024 - 10:20
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Heure en UTC. Pose depuis un voilier 13m monocoque. 1 station.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Caméra tombée sur le côté a cause de la houle, elle est relevée par la suite. Dans la Réserve Naturelle de Santa Luzia, à environ 100 m de l’île. Proximité directe d’un voilier au mouillage.
2024/02/21 Atlantea (Sailowtech) - Saint Pierre (Martinique)
2024/02/21 Atlantea (Sailowtech) - Saint Pierre (Martinique)
Date
21.05.2024 - 18:30
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Heure UTC. Ciel couvert, pluie. Fond sable + herbier. Dans zone de mouillage. Côte à environ 50m.
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Heure UTC. Kosmos non tournant. Nouveau réglage luminosité. Fond sable + herbier.
2024/04/19 Atlantea (Sailowtech) - Saint George (Bermudes)
2024/04/19 Atlantea (Sailowtech) - Saint George (Bermudes)
Date
19.04.2024 - 19:00
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Heure UTC. Kosmos non tournant. Zone mouillage. Environ 50m de la côte. Multiples épaves dans un rayon de 100m. Mise à l’eau depuis jupe voilier.
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Equipage : Ancienne équipe KOSMOS de l'ENIB + 1 Bénévole de l'école d'été + 2 de l'équipe KOSMOS Ifremer/RDT. Pilote de l'IMT.
Bateau : Zodiaque de l'IMT
Nombre de stations : 6 (Kosmos IMT) + 6 (Kosmos ENIB)
Retour sur les problèmes rencontrés et les pistes d'améliorations
Campagne essentiellement technique. Deux objectifs principaux :
- réaliser une première mise à l'eau des deux KOSMOS "brestois" réalisés par les étudiants de l'ENIB et de l'IMT
- valider l'algo d'ajustement des couleurs automatique en eau
Pour le premier point (kosmos ENIB et IMT) :
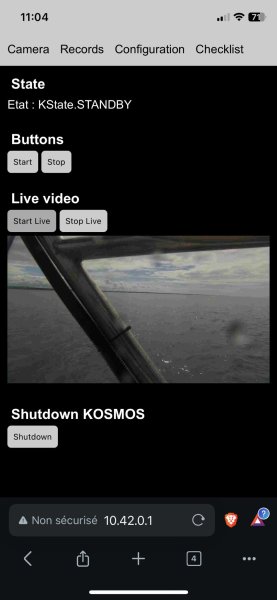
- Aucun soucis d'acquisition des vidéos. L'interface web est très efficace pour piloter le système (onglet camera) et s'assurer de son bon fonctionnement (onglet record).
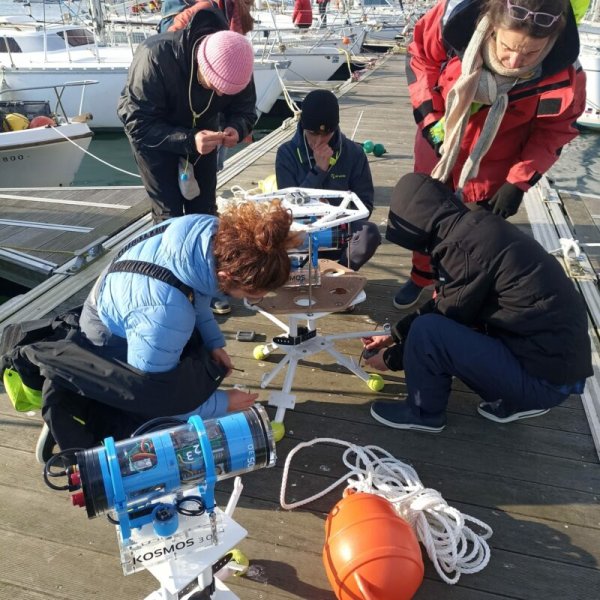
- Les nouvelles cages permettent une mise à l'eau bien plus simple qu'avec le gréement textile. Il faudra penser à enlever les barres inférieures du trépied (où étaient attachées auparavant ce gréement textile) car il complique un peu la remontée du système sur le bateau.
- En outre, le système étant sous plombé (1kg par pied), il s'est parfois couché sur le côté sans conséquence grave grâce à la protection de la cage. On recommande donc l'utilisation systèmatique de cette cage ainsi qu'un plombage plus conséquent.
- Gros soucis par contre sur les rotations qui sont a minima erratiques voire inexistantes. Un ILS d'asservissement moteur a été identifié comme inopérant (IMT), le kosmos a donc fonctionné en mode temporel mais cela n'a pas empêche le moteur de caler à l'occasion. L'autre système (ENIB) qui avait un ILS fonctionnel n'a pas mieux tourné.
Il semble donc indispensable de repenser ce système moteur et de passer (si un asservissement est toujours nécessaire) à un détecteur Effet Hall. Autre point, il faudra bloquer (pour de bon) la croix de Malte en fonction de la position des supports de la cage pour éviter de voir les barres dans la vidéo.
- Enfin, on a noter une "suspension" du système lors de notre dernier déploiement sur un fonc un peu plus conséquent. Penser à vérifier la longueur des bouts en amont. Conclusion secondaire, le kosmos (plombé à 3 kg) ne coule pas une bouée de type casier.
Pour le second point (validation algo couleur) :
L'eau lors de la sortie était relativement claire (bonne visi au fond 5-10m) mais très verte.
Trois modes d'ajustement ont été testés (grâce au volet Configuration de l'appliWeb).
Mode 0 : ajustement réalisé par l'algo AWB natif de la Picam
Mode 1 : gains awb fixés après avoir été mesurés par la Picam en surface
Mode 2 : gains awb ajustés toutes les 15s par un algo "maison" d'égalisation des histogrammes
Par ailleurs, le kosmos ENIB n'avait plus son filtre infrarouge quand celui de l'IMT le conservait.
Conclusion générale : avec les modes 0 et 1, les vidéos sont absolument "vertes" et cela complique grandement l'analyse des images. Le Mode 2 rend indéniablement du contraste à la vidéo. Il faut donc privilégier ce mode (qui pourra être éventuellement modifié à la marge).
A noter par ailleurs des soucis de netteté notamment à longue distance. Quelques suggestions pour résoudre ce problème :
- Lors de l'ajustement avant le terrain de la netteté, faire le point sur une mire à une distance MINIMALE de 5 mètres avec l'ouverture de l'objectif maximale (1.8). Bloquer la bague de netteté avec la petite vis. Remettre ensuite la bague d'ouverte de l'objectif minimale (11) de sorte à avoir la plus grande profondeur de champ.
- Pour compenser la perte de luminosité due à la fermeture du diaphragme, on augmentera les gains analogiques et numériques de la Picam. On restera ainsi à des temps d'exposition inférieurs à la durée des frames. (Il faudra valider cette aprroche incessament.)
Voici les coordonnées des stations :
Kosmos IMT:
Pos1: 48,35384° N, 4,56211° O ; Heure: 11:25 Pos2: 48,35412° N, 4,56094° O ; Heure: 11h40 Pos3: 48,35551° N, 4,56127° O ; Heure: 11h57 Pos4: 48,35211° N, 4,56495° O ; Heure: 12h22 Pos5: 48,35459° N, 4,56516° O ; Heure: 12h43 Pos6: 48,35371° N, 4,56466° O ; Heure: 12h58
Kosmos ENIB:
Pos1: 48,35498° N, 4,56121° O ; Heure: 11h27 Pos2: 48,35550° N, 4,56115° O ; Heure: 11h44 Pos3: 48,35423° N, 4,56031° O ; Heure: 12h09 Pos4: 48,35266° N, 4,56598° O ; Heure: 12h32 Pos5: 48,35314° N, 4,56364° O ; Heure: 12h48 Pos6: 48,35280° N, 4,56420° O ; Heure: 13h08
Lieu du déploiement
Entre la Pointe du Diable et la pointe du Dellec : 48.3553° N 4.5620° O
2024/07/09 - Sortie avec les jeunes du Konk Ar Lab
2024/07/09 - Sortie avec les jeunes du Konk Ar Lab
Date
09.07.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Sortie avec les jeunes du Konk Ar Lab pour la présentation de la mise en oeuvre du KOSMOS. Sortie effectuée sur un voilier de 14m avec sept personnes à bord dont 1 pilote.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Absence de plomb : difficulté à maintenir le KOSMOS à la verticale.
Impossibilité de suivre la dépose avec la lunette de calfat.
Manoeuvre pour la récupération difficile avec la taille du voilier.
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Equipage : Olivier F. et Clothilde H.
Bateau : Pêche Promenade 4.50m Beneteau Capelan
Nombre de stations réalisées : 10
Structure impliquée : Ifremer RDT/LDCM
Objectif mission : Valider modifications optiques sur la correction des couleurs et la netteté des images
Météo excellente : Pas de vent, pas de houle, grand soleil (sans nuage). Eau claire.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Kosmos a été emmené sur le bateau en annexe. Ok même si il est relativement encombrant.
Pas de difficultée particulière à déployer le système à deux (1 à la manoeuvre, l'autre gère le démarrage du kosmos, mise à l'eau et remontée en binôme).
Concernant les réglages optiques, l'ajustement des gains fonctionne à merveille. La nouvelle mise au point (à 5m en air puis profondeur de champ max grâce à un objectif fermé au max) est satisfaisante. On s'aperçoit néanmoins que le point en eau semble plus proche qu'en air. (ce qui n'est pas absurde d'un point de vue de la réfraction) A voir avec les utilisateurs sur la distance optimale de focus. Concernant la luminosité réduite par la fermeture de l'objectif, elle n'a pas posé de soucis pour cette session qui était ensoleillée et avec une turbi faible. Le capteur a encore de la marge (gain analogique notamment) pour gérer des flux lumineux moindres. De nouveaux tests devront être menés par temps gris ou changeant et plus grande profondeur (ajd'hui max à 8m).
En tout cas pas mal de vie sur les vidéos notamment une belle araignée et de jolis bancs de lançons. Les laminaires sont magnifiques avec le nouvel algo de correction des couleurs !
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Equipage : Olivier F. et Clothilde H.
Bateau : Pêche Promenade 4.50m Beneteau Capelan
Nombre de stations réalisées : 10
Structure impliquée : Ifremer RDT/LDCM
Objectif mission : Valider modifications optiques sur la netteté des images et l'ouverture de l'objectif.
Météo : Pas de vent, légère houle, temps gris. Eau claire.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Meilleure rotation du moteur suite à un ajustement des paramètres de timeout. En l'occurrence, quand on est sûr que l'ILS moteur est détecté, on peut metre le timeout du moteur à 10 voire plus. En effet, le moteur est parfois un peu faiblard sous l'eau et fonctionne au ralenti. Le timeout est alors atteint avant qu'une rotation soit effectuée.
A noter un problème avec le gréement (qui mesurait une vingtaine de mètres) sur des fonds de 13.5m. (On s'était donc dit que c'était suffisant.) Cela n'a pas empêché le système de cabaner. Notre explication : le courant a tendu le boot entre KOSMOS et la bouée de surface. Une vague plus haute que les autres a ensuite soulevé KOSMOS un instant pour finalement se pencher et tomber sur le côté. Résultat une séquence vidéo prometteuse inexploitable. Conclusion : dans les zones où le courant sévit, il faudra avoir un boot très largement supérieur à la profondeur (3 fois ?). Autre solution, plomber davantage le système (nous étions à 1kg par pied).
Concernant les vidéos, elles sont très satisfaisantes. La mise au point nous semble meilleure qu'à la précédente sortie. Il faut donc faire le point sur l'infini (et non 5 mètres) et régler l'ouverture de l'objectif à 6. De ce façon on conserve suffisamment de lumière et la netteté est très correcte de 2 à 15 m.
2024/07/29 Campagne Pointe de Brentec'h (Ploumoguer)
2024/07/29 Campagne Pointe de Brentec'h (Ploumoguer)
Cases à cocher
Staviro
Date
29.07.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Equipage : Olivier F. et Clothilde H.
Bateau : Pêche Promenade 4.50m Beneteau Capelan
Nombre de stations réalisées : 9
Structure impliquée : Ifremer RDT/LDCM
Objectif mission : Tests de luminosité à "grandes profondeurs" + essai nouvel algo sur le moteur.
Météo : Léger vent de terre, pas de houle, grand bleu, air 25 degrées. Eau claire.
Marée montante. Coefficient 54.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Déploiement à des profondeurs de 9 à 12 m qui ont donné des images très correctes : nettes et lumineuses. Par temps ensoleillée, on peut donc sans soucis atteindre ces profondeurs.
Le moteur n'a pas donné satisfaction. Même si un nouvel algo était testé, il semblerait plutôt qu'il s'agisse d'un problème hardware : le fonctionnement du moteur sous l'eau est en effet très aléatoire... L'arrivée du nouveau système est une priorité pour le respect du protocole.
Sur les 9 vidéos, seules 4 sont exploitables car le Kosmos s'est mal positionné dans les 5 autres. Deux raisons à cela : d'abord à cause du déploiement sur des champs de laminaires (il était donc littéralement enfoui sous ces algues) et ensuite car il a basculé à l'atterissage. Il faut donc absolument être à l'arrêt par rapport au sol, càd casser l'erre du bateau pour déposer le système. A noter que sur de telles profondeurs, la lunette de calfat est peu efficace pour observer l'atterrissage...
Autre observation, il peut arriver que kosmos sautille sur le substrat quand le courant est fort. La bouée de surface + le boot doivent tirer dessus... Il n'est pas déraisonnable de plomber davantage le système quand il y a du courant.
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Equipage : Olivier F. et Jocelyn C.
Bateau : Pêche Promenade 4.50m Beneteau Capelan
Nombre de stations réalisées : 8
Structure impliquée : Ifremer LDCM & LTBH
Objectif mission : Tests de luminosité à grandes profondeurs & par temps gris.
Météo : Vent SUD 4 établi 6 rafales, mer du vent en conséquence, pas de houle, temps gris, air 20 degrées. Eau assez chargée.
Marée montante. Coefficient 38.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Campagne qui s'est bien déroulée. Les problèmes de basculement ont été résolus grâce aux 3 kilos supplémentaires (6 kg de plomb en tout donc). Lunette de calfat non utilisée mais pas de soucis particuliers à la pose.
Concernant les vidéos, turbidité assez forte. Quelques secteurs orientés vers la "surface" à cause d'une pose un peu bancale (sur de grands ridins). Présence de poissons en tout genre : gobies, lançons, dorades, vielles, etc.
Habitats variés : sable, herbier, maerl (à confirmer) et laminaires.
A noter que la caméra est à sa limite en terme de sensibilité pour la luminosité, les images sont donc un peu sombres mais exploitables quand on augmentera la "brightness" sur VIAME par exemple. Ce n'set pas étonnant vu les profondeurs échantillonnées (typiquement 10m) et l'ambiance lumineuse assez sombre.
Le moteur a globalement fonctionné (au moins un tour, donc ok pour habitat) mais pas sûr que le protocole du STAVIRO soit rigoureusement suivi (cela posera des problèmes pour l'analyse poisson). Une nouvelle fois, il est urgent de passer au Kosmos 4.
Latitude Longitude Heure Profondeur
48°22′8″ N 4°45′57″ O 09:03 6m
48°23′0″ N 4°45′45″ O 09:24 10.1m
48°22′52″ N 4°46′8″ O 09:46 11.5m
48°22′51″ N 4°46′11″ O 10:08 12.4m
48°22′47″ N 4°46′7″ O 10:28 12.2m
48°21′50″ N 4°46′13″ O 10:48 10.0m
48°21′58″ N 4°46′12″ O 11:11 10.0m
48°22′55″ N 4°45′55″ O 11:29 4.9m
2024/09/12 - Penfoulic Problématique des dorades K1
2024/09/12 - Penfoulic Problématique des dorades K1
Cases à cocher
Mikado
Date
12.09.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Marine et Antoine, ainsi que Mat' le conchyliculteur concerné par la problématique des dorades qui mangent les cultures de coques ; sur sa plate.
2024/09/12 - Penfoulic Problématique des dorades K3
2024/09/12 - Penfoulic Problématique des dorades K3
Cases à cocher
Mikado
Date
12.09.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Marine et Antoine, ainsi que Mat' le conchyliculteur concerné par la problématique des dorades qui mangent les cultures de coques ; sur sa plate.
2024/09/20 - Penfoulic Problématique des dorades K1
2024/09/20 - Penfoulic Problématique des dorades K1
Cases à cocher
Mikado
Date
20.09.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Antoine avec Mat et Seb les conchyliculteurs concernés par la problématique des dorades qui mangent les cultures de coques ; sur leur plate.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Trop de marée basse
2024/09/20 - Penfoulic Problématique des dorades K2
2024/09/20 - Penfoulic Problématique des dorades K2
Cases à cocher
Mikado
Date
20.09.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Antoine avec Mat et Seb les conchyliculteurs concernés par la problématique des dorades qui mangent les cultures de coques ; sur leur plate.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Trop de marée basse
2024/09/20 - Penfoulic Problématique des dorades K3
2024/09/20 - Penfoulic Problématique des dorades K3
Cases à cocher
Mikado
Date
20.09.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Antoine avec Mat et Seb les conchyliculteurs concernés par la problématique des dorades qui mangent les cultures de coques ; sur leur plate.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Trop de marée basse.
2024/10/02 - Penfoulic Problématique des dorades K3 Sortie avec Bréhoulou
2024/10/02 - Penfoulic Problématique des dorades K3 Sortie avec Bréhoulou
Cases à cocher
Mikado
Date
02.10.2024
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Sortie terrain avec la classe de 1ère aqua de Bréhoulou. Recontre de la classe avec Mat et Seb les conchyliculteurs. Déploiement d'un KOSMOS à marée basse, à pied.
Retour sur les problèmes rencontrés et les pistes d'améliorations
Eau trouble...
2025/04/10 - Ile Chevalier pour partenaires Breholou et Conchyliculteur. Prédation des dorades royales.
2025/04/10 - Ile Chevalier pour partenaires Breholou et Conchyliculteur. Prédation des dorades royales.
Cases à cocher
Mikado
Date
10.04.2025
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Déploiement en mode Micado du K1 (14 heures de vidéos prévues). Déploiement à pied avec D. Pelletier et M. Le Corre à proximité des filets à palourdes tout juste relevés. 47.853268,-4.175054
Retour sur les problèmes rencontrés et les pistes d'améliorations
Déploiement laborieux à cause du substrats vaseux. 58 films de 10 minutes récupérés (une dizaine d'heures donc) puis extinction à cause de la batterie déchargée. Pas eu assez de temps pour la recharger la vieille... La première analyse des vidéos laisse à penser que l'analyse sera compliquée du fait d'une visibilité mauvaise.
2025/04/10 - Penfoulic pour partenaires Breholou et Conchyliculteur.
2025/04/10 - Penfoulic pour partenaires Breholou et Conchyliculteur.
Cases à cocher
Mikado
Date
10.04.2025
Description (équipage + type de bateau + nombre de stations réalisée + structures présentes)
Déploiement en mode Micado du K2 (14 heures de vidéos prévues). Déploiement à pied avec D. Pelletier et M. Le Corre sur le parc à Palourdes de Cap Coz. 47.892412, -3.974353
Retour sur les problèmes rencontrés et les pistes d'améliorations
Déploiement à pied sans problèmes. 71 films de 10 minutes récupérés puis extinction normale par M. le Corre. La première analyse des vidéos laisse à penser qu'une analyse sera possible. Quelques mulets observés après un dérushage rapide.
Courte présentation
Des étudiants vont se charger de reproduire un KOSMOS, de le tester et de développer une IA capable d'identifier les éspèces de poissons.
Description
Framasoft, c’est une association d’éducation populaire, un groupe d’ami·es convaincu·es qu’un monde numérique émancipateur est possible, persuadé·es qu’il adviendra grâce à des actions concrètes sur le terrain et en ligne avec vous et pour vous !
Dominique transmet à Antoine les infos de la discussion sur le workflow du 19 août
Solutions ou pistes explorés
1. Technique: (Antoine-> Olivier F)
pb de connexion au kosmos qd il sort de l'eau
réglages optique
2. Tests à prévoir sur le terrain entre le 22 et le 30 (Antoine, Tristan, Marine)
pour avoir des systèmes opérationnels pour le terrain avec les conchyliculteurs
tester rotations, connexion et réglages optiques
3. Collaboration Conchyliculteurs:
Bilan Ile Chevalier à faire pour Jean-Louis Ollivier, Nicolas et Kévin (Antoine)
Prévoir RDV avec JLO début septembre pour finaliser le programme et le budget de l'action Bréhoulou (voir fichier utile ci-dessous)(Dominique)
Contacter Sébastien LE GAC, conchyliculteur à Penfoulic (Cap Coz, coques) (Antoine)
Prévoir terrain début septembre (le 6? ou semaine suivante ?), de préférence Odet et Penfoulic
Répondre au journaliste du Télégramme (Bruno Salaün) qui veut assister à ce terrain et faire un article sur KAL-Ifremer-Conchyliculteurs (Antoine)
NB: important de bien formaliser ces collaborations avec les professionnels pour le FEAMPA
4. Projet IMT:
prévoir un CdC minimal pour l'hydrophone et prévoir l'hydrophone dans le CdC pour l'interface (doit être démarré via l'app, génère des données à téléverser) (Antoine-> Olivier F)
5. Espace de stockage des images
relancer ODATIS et Vidéothèque (Dominique)
6. Perspectives OFB
prévoir discussion avec Morgane Remaud et Nazaré pour inclusion éventuelle d'actions dans le projet FEAMPA
test KOSMOS pays basque: Prévoir discussion, mais pb de l'éloignement du site
7. Prochaine réunion de travail et COPIL (Dominique)
4, 5, 6 : au KAL si possible
COPIL le 5 après-midi à confirmer
ODJ voir les nouveaux sujets (§9) dans le CODIMD (lien au début de cette fiche)
Résumé
“Sure he’s a looker, but does he do diapers?” That’s a question that should cross every girl’s mind. Sure, it’s important if he’s financially secure or if he’s a hard worker, but the deal-breaker question should be: Does he do diapers?
Billet
Okay, so I”m exaggerating a bit, but only a tad bit.
I remember the first time I saw his light blue eyes. I was mesmerized. Seriously, I thought he was gorgeous. Little did I know that he was interested in me, so becoming friends wasn’t hard. We got to know each other and I quickly realized he was a solid good guy. He had values, determination, faith, a strong work ethic, honesty … but I still wasn’t hooked.
What kept me around was the first time I saw him around his nephews. Amigas, that’s when I knew he’s the real deal. He didn’t blow them off to hang out with me, even though I secretly wished we got some time alone. He was Uncle Ben, and he took that title seriously. I’m glad I stuck around because …
I married that gorgeous, blue-eyed man! Though I found an amazing man, husband, and father, the reality is that we aren’t the perfect couple nor are we the perfect parents. But dang, he’s a good daddy. I love that my babies’ daddy is present, involved, and a wonderful example to them. And just for the record, he does know how to change a diaper or two.
I asked some of my mom friends to share with us what makes men “daddy,” and this is what they shared. Enjoy!
What Makes Men “Daddy”:
First, I’ll chime in about my dad.
Mi papi has always believed in me. When I first started baking, he was the only one that ate my first batch of cookies that tasted like glue. Now that’s love!
Playing in the sand with us, getting dirty without a worry. — Nadia from Teach Me Mommy
He is intentional with our children. He looks for opportunities to spend time with them and invest in them. He takes them to the donut shop every Friday. He goes out to toss a football in the street in front of our house. He even volunteered to be our teenager’s cabin leader this week. — Dana from Dana Vaudrin
Quality of a good dad: willing to journey WITH the kids as they grow and change. — Amanda from The Educators’ Spin On It
Being a big kid himself. He loves playing with the kids and playing the games and with the toys, too. — Jaime from Frogs and Snails and Puppy Dog Tails
Things to look for in a hubby:
A heart for God
Tenacity
A fabulous sense of humor …
These are so important in a husband because your sons will emulate him and your daughter will look for a man like him … — Rosemond from Big Hair and Books
He reads with the kids, and that takes a whole lot of patience. — Jodie from Growing Book by Book
Look for patience, intelligence, and a sense of humor. DH Mike has all three, and he is a wonderful dad! — Maryann from Mama Smiles
Look for a man who has a goal in his life (not a material one, but a personal one: spiritual, talents to develop, etc.), who has good moral values, and wants to have kids! — Eolia from La Cite des Vents
My husband Michael is a godly father because he is here, continually, for his children. He is involved in their lives — big and small. He reads to them and prays with them every night, guiding them as they talk to God. Someone once told us “Listen to the small things from your children when they are small and they will share with you the big things when they are older.” — Michelle from St. Lois
A good father is someone who despite being busy tries to make time for his family. It is not the quantity that matters but the quality. Even if it is a story before bedtime or a breakfast together or a simple stroll in the park once a week. Someone who is committed to his family and puts his family as a priority. — Varya from Creative World of Varya
A good man is often a good father. Because if the man is committed, dedicated, loving, caring, patient, full of virtue and values and faith — how could he NOT be a wonderful father? — Christine from The Mom Cafe
My favorite quality about my husband is that he’s an amazing father-figure; he’s always teaching him new things, whether it’s a new game, sport, or learning activity. He teaches him to never give up and to keep trying even when he doesn’t succeed the first time. I love seeing them together, especially when my son is trying to copy and be just like his daddy! — Jackie from I Heart Arts and Crafts
My husband told me (and I agree) that it is not the woman’s role to raise kids — it is the parent’s role, together. — Becky from Your Modern Family
A good dad loves kids and finds great pleasure in being in the moment with them, being into the things they are into. He’s also someone who is a great leader (setting a good example via his actions rooted in morals and values) and supporter (listening, comforting). — Stephanie from InCultureParent
A great dad isn’t afraid to show emotion and affection, will let his inner child come out, is a partner at parenting, and is a great role model. — Sara from Mom Endeavors
Caring, patient, and family-oriented. A man who takes care of his mother will be a man who will take care of his wife and children. I saw it with my own father as well as my husband. — Carrie from Crafty Moms Share
I grew up with a dad that gave us all that we needed — education, clothing, studies — but he was always traveling. I married a man that is always by my kiddo’s side. He is patient, funny, and sometimes he is a child himself. I do not hold any bad feelings towards my dad; I suppose my dad was always worried that we had all the things we needed. But my husband is more worried about the spiritual side and soul side of my kiddos and myself. He is also a good provider. — Cecy
A good father is someone who cares about his family and loves his wife and children. But I think the most important thing is that he’s a good person. — Olga from The European Mama
I grew up in an abusive household. I would have wished for a dad that was a good listener, one that valued spending time doing little things with me. And one who was ready to see that all children have to find their own way, that they are not “wish-fulfillers” for their parents, but people who will grow and blossom in their own unique and beautiful way. I would have hoped for a dad that could not “make it all better” but one who vowed to stand by me until the light shined through. Sigh! — Daria